
Co wyjdzie, jeśli do map Google dodać Janosika i pomnożyć przez aktualizację w czasie rzeczywistym i 100 razy większą precyzję? Nowe mapy Toyoty.
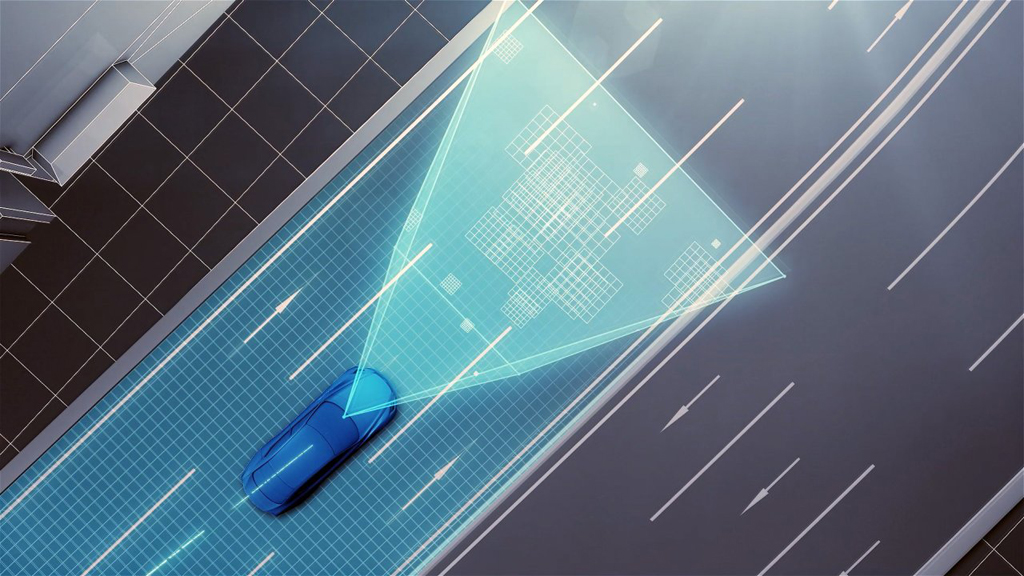
Toyota rozwija system generowania wysoce precyzyjnych map z myślą o technologii zautomatyzowanego prowadzenia pojazdów. System ma wykorzystywać dane z kamer i odbiorników GPS samochodów zwykłych użytkowników – warunkiem uczestnictwa w programie jest oczywiście zainstalowanie takich urządzeń w samochodzie. W ten sposób Toyota przenosi crowdsourcing znany kierowcom chociażby z Janosika na wyższy poziom. Projekt zostanie zaprezentowany podczas targów CES (Consumer Electronics Show) 2016, które odbędą się w Las Vegas dniach 6-9 stycznia.
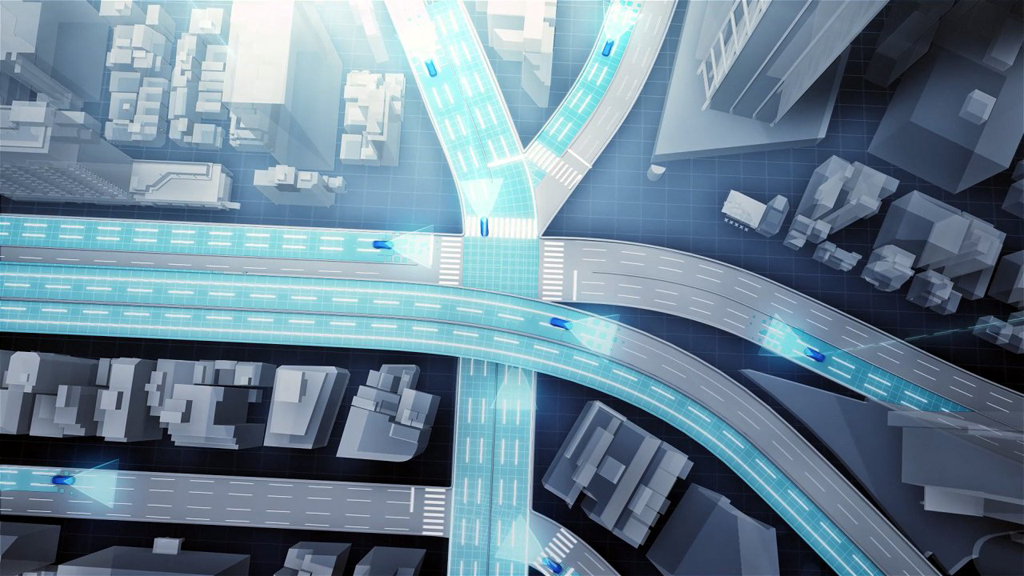
System wykorzystuje kamery i dane GPS tysięcy pojazdów do gromadzenia obrazów dróg. Informacje te trafiają do centrów przetwarzania danych, gdzie są automatycznie łączone w spójną całość, poddawane korekcji i aktualizowane. W ten sposób na bieżąco powstają mapy dróg dla rozległych obszarów, na tyle precyzyjne, że umożliwiają autonomicznym samochodom bezkolizyjne poruszanie się po drogach publicznych.
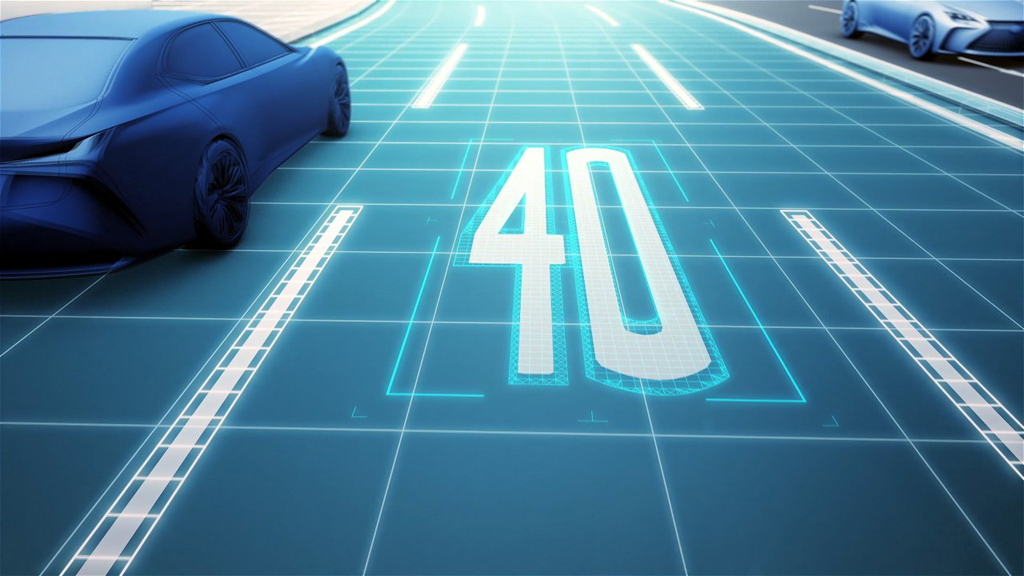
Warunkiem skutecznego wdrożenia systemów automatycznego prowadzenia pojazdów jest dysponowanie cyfrowym opisem układu dróg z uwzględnieniem zasad ruchu drogowego, w tym informacji o ograniczeniach prędkości i oznakowaniu dróg. Precyzyjna lokalizacja pojazdów wymaga także dostępu do informacji o oznakowaniu poziomym, krawężnikach i innych elementach dróg, a także dziurach i wybojach.
Do tej pory dane dla systemów automatycznego prowadzenia samochodów gromadzone były przez specjalne pojazdy wyposażone w trójwymiarowe skanery laserowe. Dane zbierane przez nie podczas jazdy po obszarach zurbanizowanych i terenach niezabudowanych były ręcznie uzupełnianie o dodatkowe informacje np. o oznakowaniu. Wadą tego sposobu tworzenia map jest jednak rzadka aktualizacja, ograniczająca ich użyteczność. Metoda ta wiąże się ponadto ze znacznymi kosztami, wynikającymi z manualnego procesu gromadzenia i uzupełniania informacji.
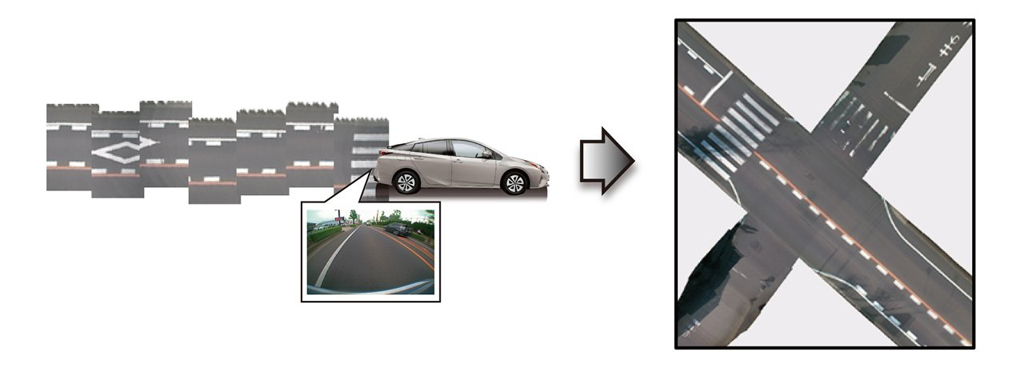
Choć efekty działania takiego systemu, opartego na kamerach i GPS, obarczone są większym prawdopodobieństwem błędu, niż dane uzyskane z użyciem trójwymiarowych skanerów laserowych, błędy pozycjonowania można eliminować za pomocą technologii integrujących i korygujących obrazy zebrane z wielu pojazdów, a także precyzyjnych mechanizmów wyznaczania trajektorii ruchu. Dzięki temu błąd pozycjonowania na prostych drogach nie przekracza 5 cm. Wykorzystanie do gromadzenia informacji pochodzących z wielu pojazdów zwykłych użytkowników i istniejącej infrastruktury zapewnia bieżącą aktualizację danych. Dodatkową zaletą jest możliwość wdrożenia i rozbudowy systemu przy stosunkowo niewielkich nakładach.
Toyota chce rozpocząć program crowdsourcingowego tworzenia map w 2020 roku. Choć początkowo użycie systemu ma być ograniczone do dróg ekspresowych i autostrad, plany dalszego rozwoju przewidują rozszerzenie jego zastosowania na zwykłe drogi, a także wykorzystanie do zapobiegania wypadkom. Toyota będzie również dążyć do rozwinięcia współpracy z dostawcami map, aby udostępnić swoją technologię szerokim rzeszom użytkowników.
Nowy system tworzenia map stanowi część programu Mobility Teammate, zaprezentowanego przez Toyotę w październiku 2015 r. Jest to strategia wprowadzania technologii zautomatyzowanego prowadzenia pojazdów w taki sposób, by nie zmniejszać przyjemności, jaką kierowcy czerpią z jazdy samochodem.



 Ile kosztuje OC i AC nowego samochodu?
Ile kosztuje OC i AC nowego samochodu? Leasing finansowy – bardziej elastyczny od kredytu? Poznaj jego zalety
Leasing finansowy – bardziej elastyczny od kredytu? Poznaj jego zalety Auto assistance krótkoterminowe za granicą – ochrona w każdej sytuacji
Auto assistance krótkoterminowe za granicą – ochrona w każdej sytuacji Pierwszy raz kupujesz ubezpieczenie OC? Zrób to z kalkulatorem OC krok po kroku!
Pierwszy raz kupujesz ubezpieczenie OC? Zrób to z kalkulatorem OC krok po kroku! Ubezpieczenie OC – podstawowe informacje o zakresie ochrony w polisie OC. Co obejmuje ubezpieczenie OC samochodu?
Ubezpieczenie OC – podstawowe informacje o zakresie ochrony w polisie OC. Co obejmuje ubezpieczenie OC samochodu? Od czego zależy wysokość składki ubezpieczenia? Wyjaśniamy
Od czego zależy wysokość składki ubezpieczenia? Wyjaśniamy Zupełnie nowy Mercedes-Benz CLA
Zupełnie nowy Mercedes-Benz CLA Klasa sama w sobie: nowe Audi A6 Avant
Klasa sama w sobie: nowe Audi A6 Avant Elektryczne Volvo ES90 to klasa sama w sobie
Elektryczne Volvo ES90 to klasa sama w sobie Volkswagen przedstawia ID. EVERY1 – zapowiedź elektrycznego modelu dla każdego
Volkswagen przedstawia ID. EVERY1 – zapowiedź elektrycznego modelu dla każdego Maserati uzupełnia gamę GranCabrio na I.C.E. St Moritz
Maserati uzupełnia gamę GranCabrio na I.C.E. St Moritz Nowe Volvo EX30 Cross Country – premierowa prezentacja w zimowej chacie
Nowe Volvo EX30 Cross Country – premierowa prezentacja w zimowej chacie Nowy Opel Astra GS 2025 – czy niemiecka precyzja podbije segment kompaktów?
Nowy Opel Astra GS 2025 – czy niemiecka precyzja podbije segment kompaktów? Nowe Suzuki Swift – czy to nadal miejski hit, który kochają kierowcy?
Nowe Suzuki Swift – czy to nadal miejski hit, który kochają kierowcy? MG HS 1,5 Turbo Excite – budżetowy SUV, który chce namieszać w Europie
MG HS 1,5 Turbo Excite – budżetowy SUV, który chce namieszać w Europie Nissan Ariya Force – elektryczny crossover, który pokazuje pazur. Czy napęd AWD robi różnicę?
Nissan Ariya Force – elektryczny crossover, który pokazuje pazur. Czy napęd AWD robi różnicę? Nissan X-Trail MHEV – hybryda, która podbija teren i trasy
Nissan X-Trail MHEV – hybryda, która podbija teren i trasy Jeep Avenger Benzyna – kompaktowy SUV z charakterem i małym zgrzytem
Jeep Avenger Benzyna – kompaktowy SUV z charakterem i małym zgrzytem